











.3D模型:
.商品簡介:
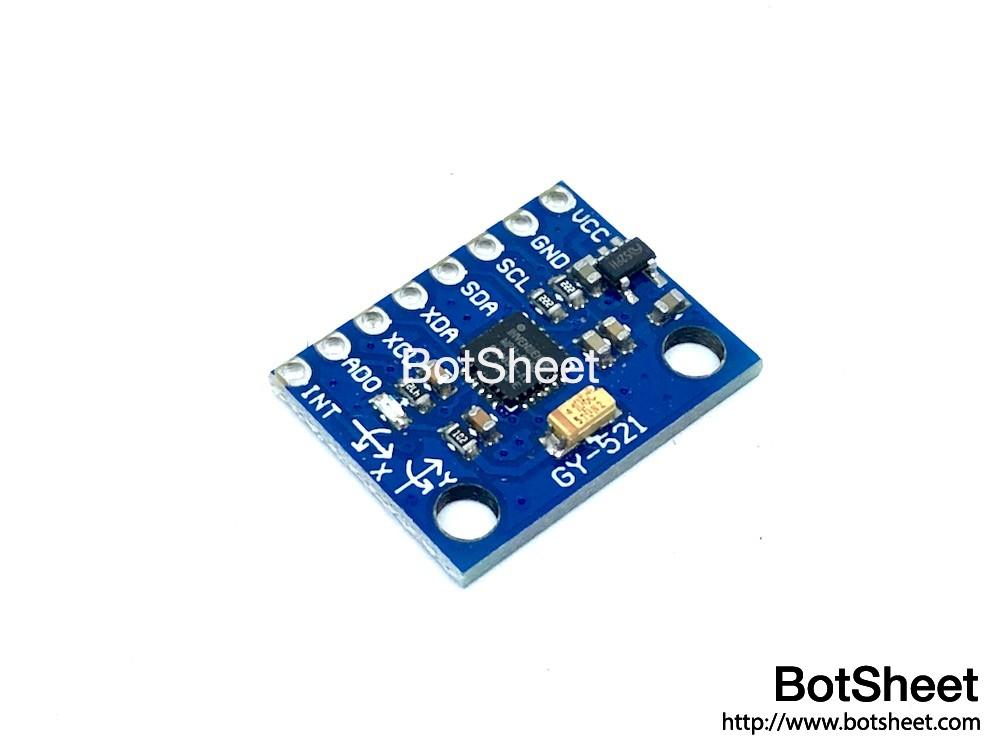
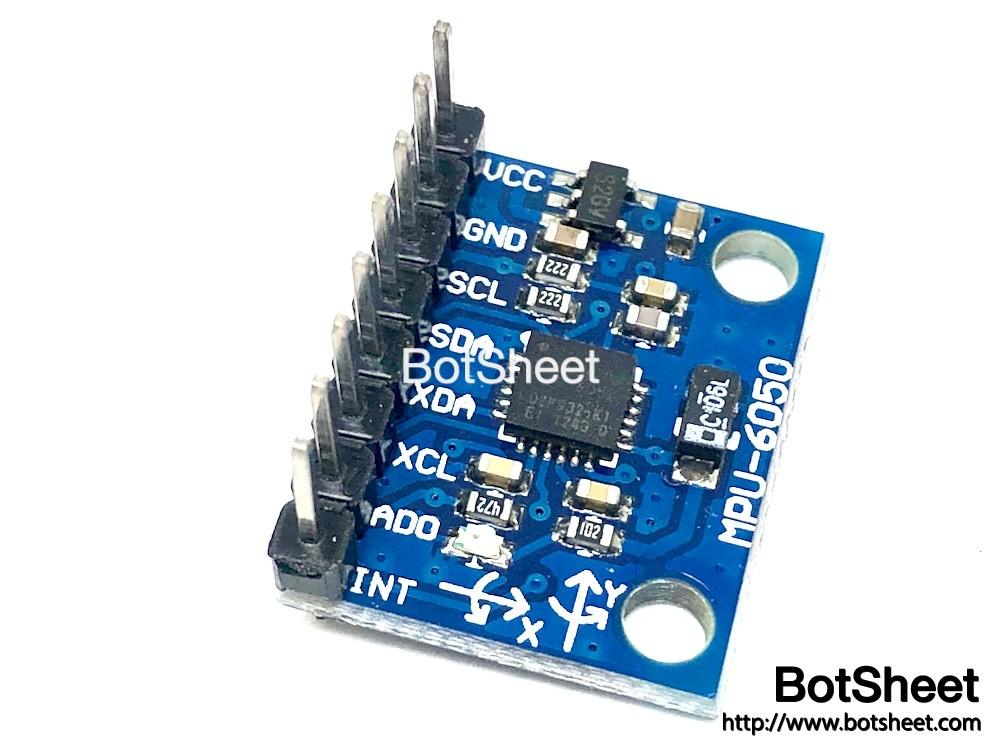
GY-521模組是MPU-6050芯片 具有三軸陀螺儀、三軸加速度計、數碼運動處理器(DMP)和溫度傳感器。數碼運動處理器可以直接在電路板上處理複雜的算法。通常DMP處理的算法是將傳感器的原始值轉化為穩定的位置數據。GY-521模組通過I2C串行數據總線檢索傳感器的數值,只需要兩條接線(SCL和SDA)就可以檢索到環境數據。
.主要用途:
為你的項目加上三軸陀螺儀、三軸加速度計功能
.商品特色:
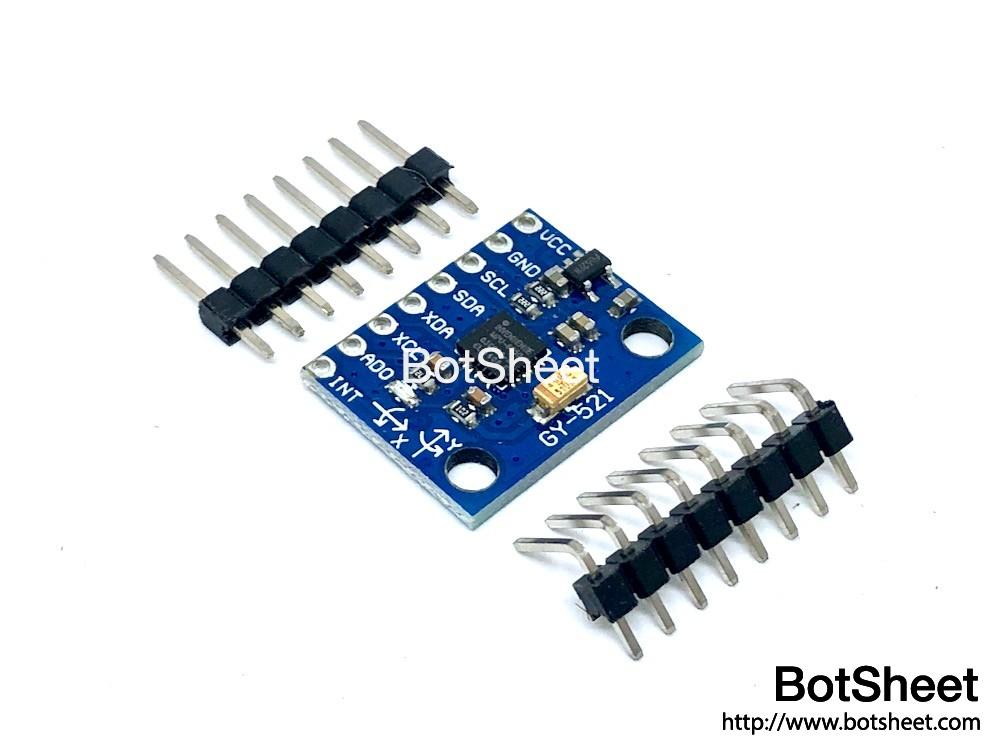
– PCB板設有固定螺栓孔,方便安裝
– I2C制式
– 只需要兩條接線,便能夠提供數據
.商品規格:
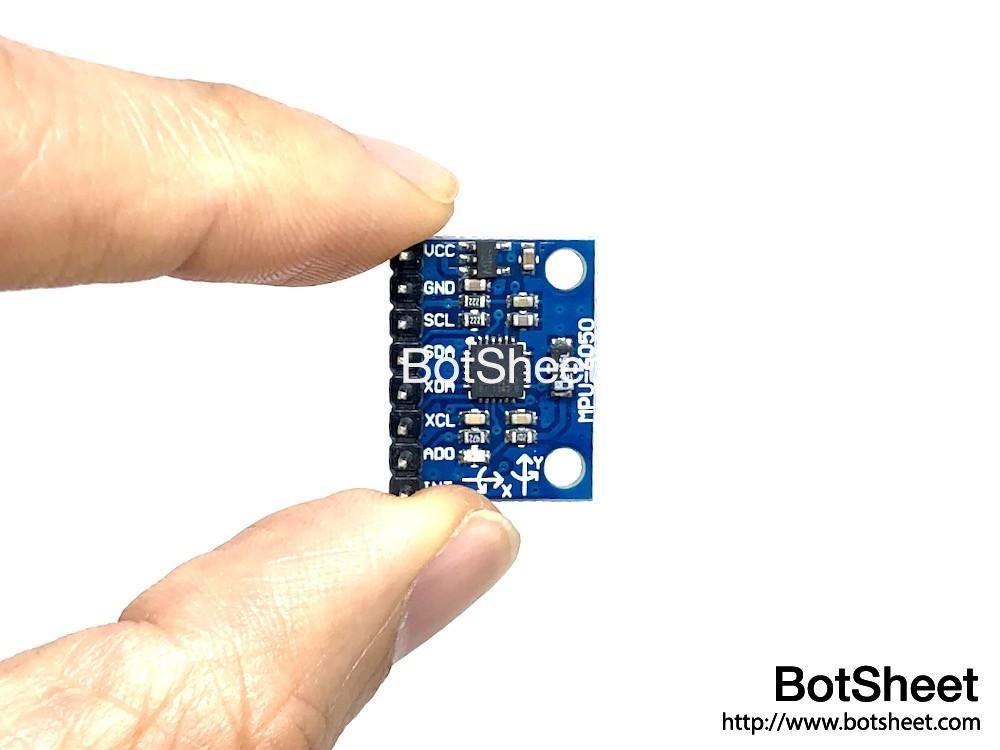
尺寸:16*20*3mm
重量:3g
電壓:3.3V-5V
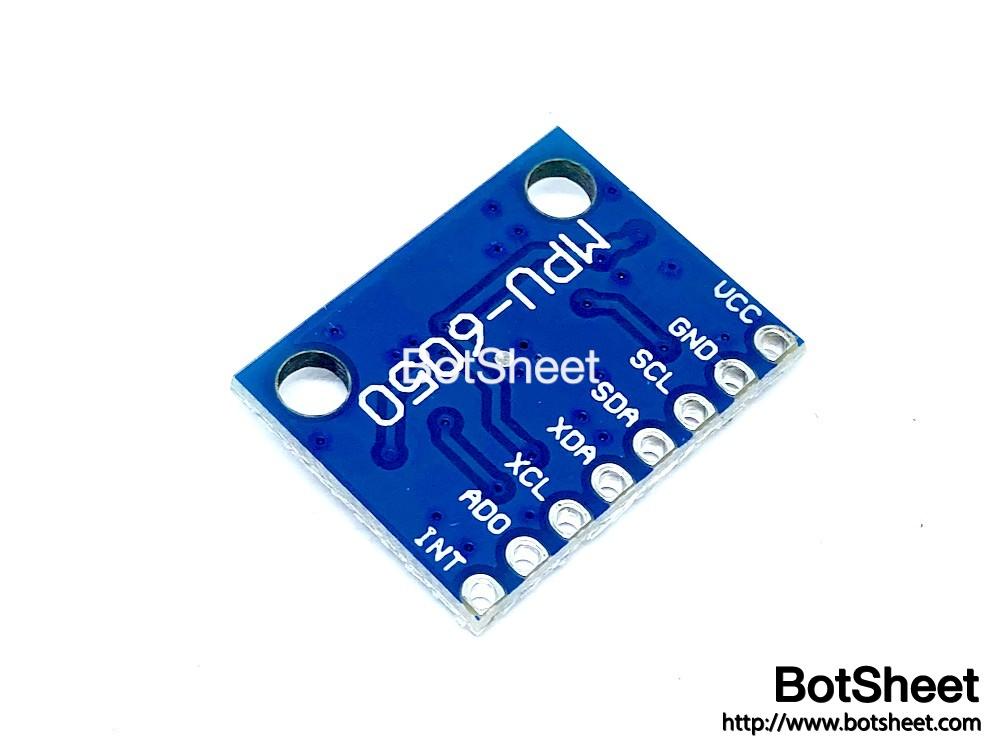
芯片:MPU-6050
型號:GY-521
陀螺儀範圍:±250 500 1000 2000°/s
加速度範圍:±2 ±4 ±8 ±16g
通信方式:I2C
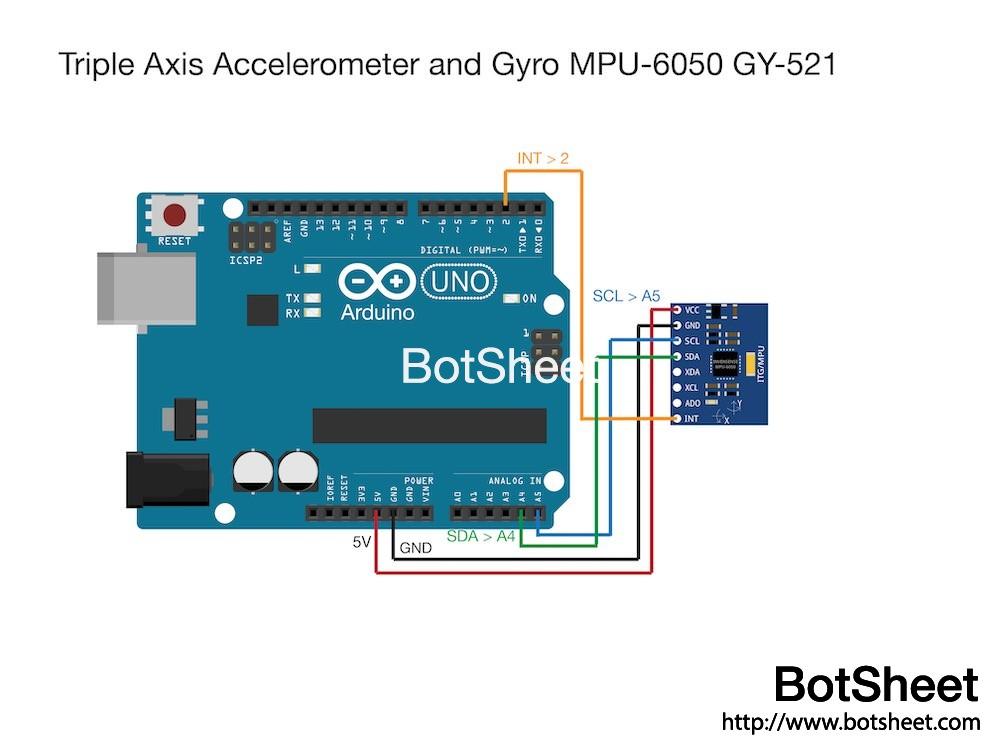
.接線說明:
SDA – 接 Arduino UNO 的 Analog Pin 4 SDA
SCL – 接 Arduino UNO 的 Analog Pin 5 SCL
GND – 接 GND
VCC – 接 +5V
AD0 (如果該引腳為LOW,則模組的I2C地址為0x68。如果該引腳為高電平,地址將為0x69。)
INT (中斷數字輸出)
.商品包含:
1 x 6軸模組 MPU-6050
・示範短片:
・程式範例:






商品評價
目前沒有評價。