










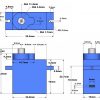
.3D模型:
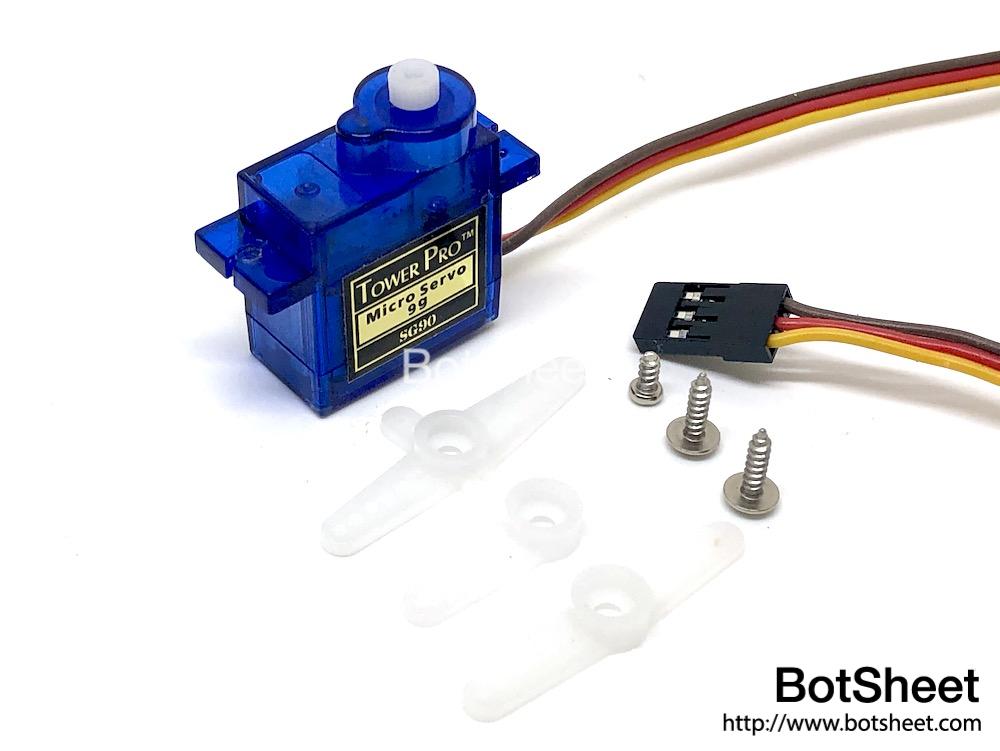
.商品簡介:
Tower Pro SG90 為一款小型舵機,舵盤可以旋轉270度,運作原理依照標準的模擬(Analog)類型,但體積更細小。你可以使用Arduino或Raspberry Pi來控制這款舵機。對於一些簡單的項目,或只是想讓東西移動,這款舵機便非常合適 ,而且體積細小,容易安裝在各種地方上。當然,它的拉力強度雖無不大,但是足夠製作小型的機械人,是眾多Maker最常使用的舵機。
.主要用途:
製作機械人
製作智能系統
.商品特色:
體積輕巧,只有9g的重量
普及度高,網上富有豐富資料
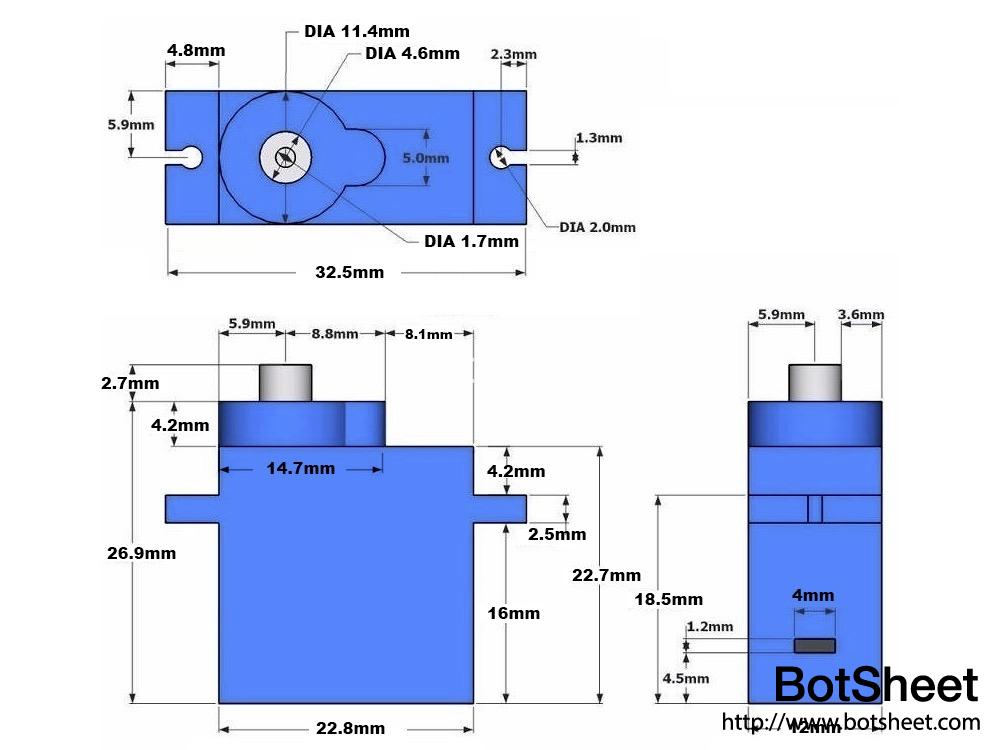
.商品規格:
材質:齒輪為尼龍材質
重量:9g
尺寸:23*12.2*29mm
電壓:4.8V
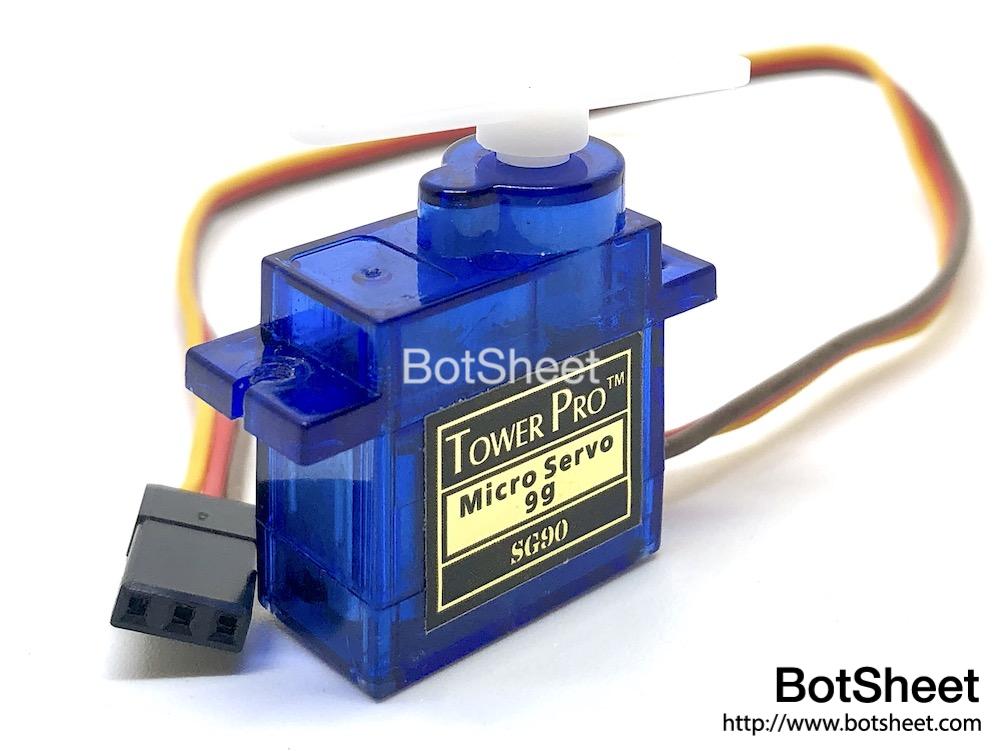
接線:啡色-接地,紅色-正極,橙色-信號
速度:0.1秒 ∕ 60度
轉矩:1.6kg-cm
脈衝寬度:500~2400µs
死頻寬度:10µs
.商品適用:
Arduino, Raspberry Pi
.商品包含:
1 x SG90 Tower Pro 小型舵機
1 x 搖臂包
1 x 螺絲包
.示範短片:
.程式範例:













商品評價
目前沒有評價。