













.商品簡介:
這款Arduino馬達擴展板由Arduino意大利官方親自設計,能夠直接插在Arduino主板上使用,採用L298P高級馬達芯片,擁有雙端全橋驅動(Dual Full-Bridge Driver),可以同時獨立驅動兩路直流、步進馬達或者繼電器。
帶有豐富的官方程序資料庫(Library)檔案,只要簡單數行程式,即可操控馬達的方向和轉速控制,做出功能完善的智能小車。擁有眾多高階功能,可以PWM調速,可以實時測量每一路的馬達電流值。
兼容 TinkerKit,完全兼容 Arduino Uno R3疊層式插拔設計,也可以直接與其疊層插拔。
.主要用途:
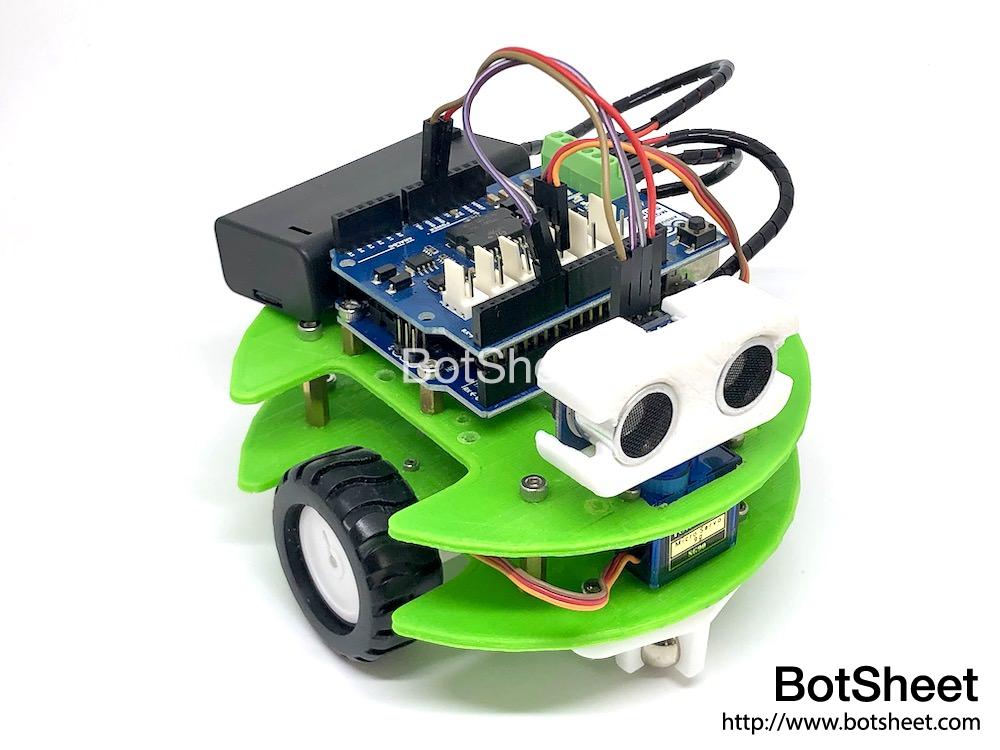
廣泛用於智能小車、智能家居、步進馬達應用上
.商品特色:
– 由Arduino意大利官方親自設計
– 使用L298P高級馬達芯片
– 峰值高達2A,35V
– 可以同時獨立驅動兩路直流、步進馬達或繼電器。
– 可以實時測量每一路的馬達電流值。
– 完全兼容 Arduino Uno R3疊層式插拔設計
– 通過模擬IO直接讀取電流。
– 兼容 TinkerKit,可以直接與其疊層插拔。
.商品規格:
尺寸:36.2*38*50.8mm
重量:25g
芯片:L298P高級馬達芯片
工作電壓:5V-12V
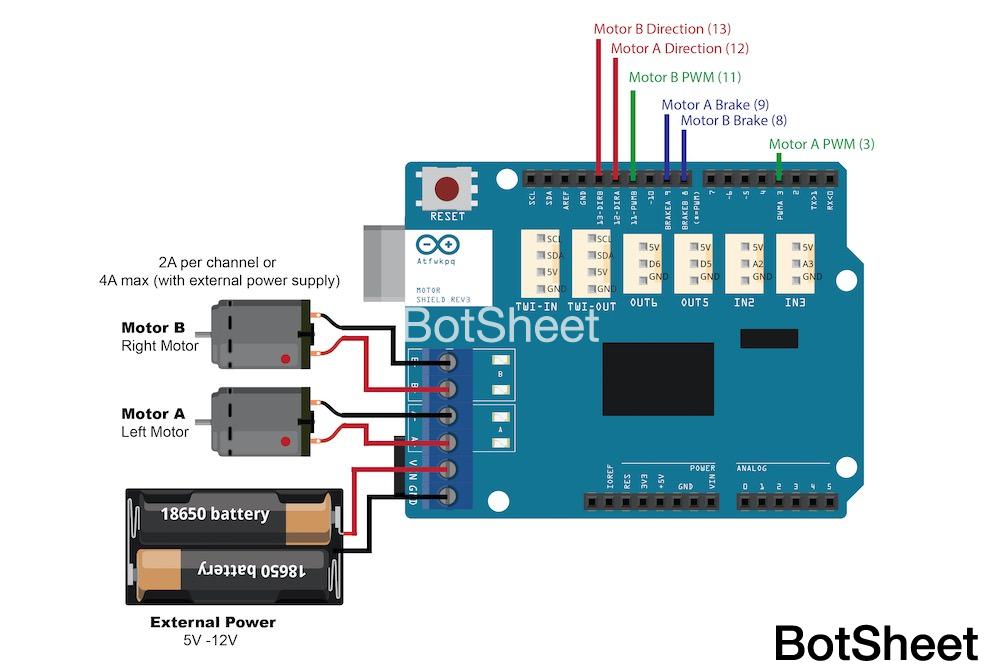
馬達控制器:2路直流馬達或1路步進馬達
最大電流:2A/路,4A最大值(外部電源輸入)
電流感應:1.65V/A
.商品包含:
1 x Arduino Motor Shield R3 官方馬達擴展板
・示範短片:
.程式範例:







商品評價
目前沒有評價。